DUSt3R
DUSt3R在描述相对位姿估计都时候提到
One way is to perform 2D matching and recover intrinsics as described above, then estimate the Epipolar matrix and recover the relative pose
相对位姿估计的一种方法是执行2D匹配并恢复如上所述的内部函数,然后估计极线矩阵并恢复相对姿态,另一种方法是直接比较点地图。当然,DUSt3R采用的是后者。
对极几何
考虑如下场景:
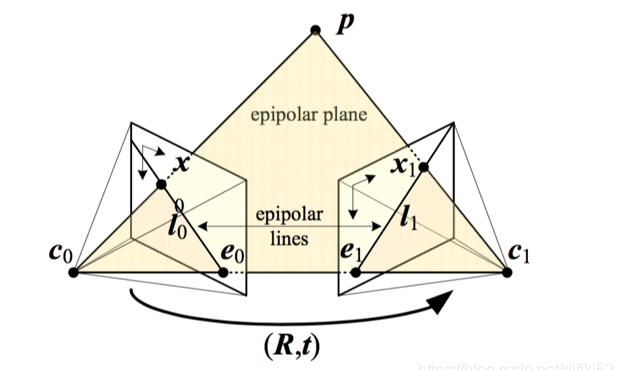
主要思想是:
- 给定两张影像,获得对应的3D坐标点对。
- 先计算基础矩阵F,
- 然后结合相机内参矩阵K,恢复本质矩阵E。
- 对E进行SVD分解,得到R和t。
对极约束
假设世界坐标系下点坐标为P,像素坐标系下点坐标为p,相机内参矩阵为K,相机外参矩阵为R,t,则有:
dp=KP
其中d为齐次化矩阵,对于两个相机,有:
d0p0=KP
d1p1=KP
已知R,t,则有:
d1p1=K(RP+t)
令x=K−1p,则有:
d0x0=P
d1x1=RP+t
即:
d1x1=R(d0x0)+t
两边同时叉乘t,有:
t×d1x1=t×R(d0x0)
t×x1=t×Rx0
两边同时左乘x1T,有:
x1Tt×x1=x1Tt×Rx0
得到:
0=x1Tt×RTx0
本征矩阵
由对极约束,本征矩阵E满足:
E=t×R
x1TEx0=0
多组点可以求得E,然后对E进行SVD分解,得到R,t。
基础矩阵
基础矩阵F满足:
F=K−TEK−1
是在本征矩阵基础上加入了相机内参矩阵的约束。
其他
- 通过对极几何可以恢复相机的相对姿态,但是无法恢复绝对姿态。

