DUST3r
github连接:DUSt3R
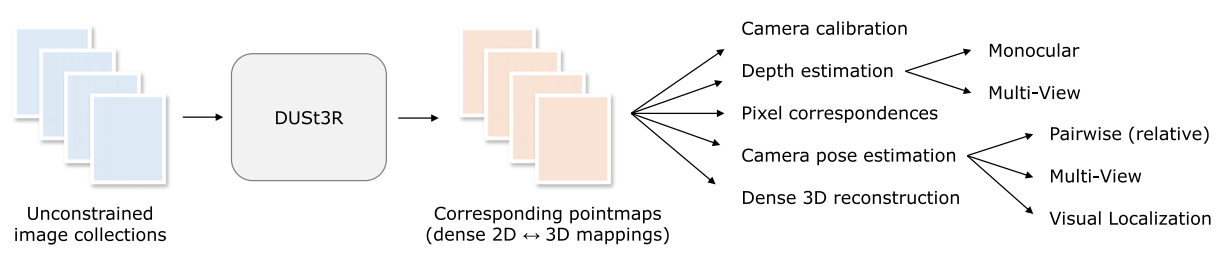
DUSt3R是一种旨在简化几何3D视觉任务的新框架。作者着重于使3D重建过程更加易于使用和高效。该框架利用深度学习和几何处理的最新进展,提高了准确性并降低了计算复杂性。
DUSt3R以一组不受约束的图像为输入,输出点图(pointmaps),从这些点图可以直接推导出各种几何量。
算法流程
网络结构
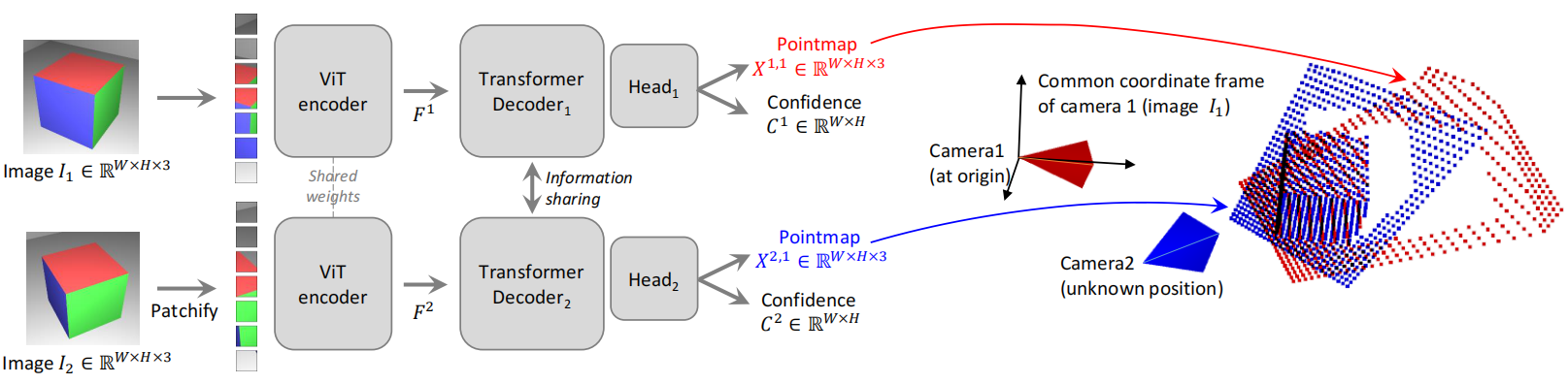
输入: 两张不受约束的图像
通过共享权重的ViT网络生成两个token,返回在解码器中进行联合推理,在解码器传递过程中,两个分支之间不断共享信息。这对于输出正确对齐的点图至关重要。也就是说,每个解码器块关注来自另一个分支的token:
Gi1=DecoderBlocki1(Gi−11,Gi−12)
Gi2=DecoderBlocki2(Gi−12,Gi−11)
输出: 经过Head处理后输出点云图和置信图,点云图的坐标系为第一张图片的坐标系。
训练目标
-
3D回归损失函数
lregr(v,i)=∣∣z1Xiv,1−z1Xiv,1∣∣
Xn,m是指相机n得到的点云图Xn在相机m的坐标系下观测到的。上述公式用于计算像素i∈Dv在视图v中的3D回归损失。
z=norm(X1,X2)=∣D1∣+∣D2∣1v∈1,2∑i∈Dv∑∣∣Xiv∣∣
代表平均距离,分别通过z和z对预测和真实点图进行归一化,它们只是表示所有有效的点到原点的平均距离。
-
置信度感知损失
存在定义不明确的 3D 点,例如在天空中或半透明物体上。更一般地,图像中的某些部分通常比其他部分更难预测。因此,共同学习预测每个像素的分数,该分数表示网络对该特定像素的置信度。最终的训练目标是所有有效像素的置信度加权回归损失:
Lconf=v∈1,2∑i∈Dv∑Civ,1lregr(v,i)−αlogCiv,1
下游应用
- 点匹配
通过最近邻算法,建立两个图像像素之间的对应关系。
- 恢复相机内参
假设主点大致位于中心,像素为正方形,因此只需估计焦点f。
- 相对姿态估计
执行 2D 匹配并恢复内参矩阵,然后估计对极矩阵并恢复相对姿态;或者使用 Procrustes 对齐比较点图获得相对姿态
参考我的另一篇文章对极几何
- 绝对姿态估计
全局对齐
- 配对图
俩俩配对,构建一个连通图,根据两对的平均置信度测量它们的重叠,然后过滤掉低置信度的对。
- 全局优化
- 恢复相机参数

